
Saturday, July 25, 2009
Robots
Robot is a virtual or mechanical artificial agent. In practice, it is usually an electro-mechanical system which, by its appearance or movements, conveys a sense that it has intent or agency of its own. The word robot can refer to both physical robots and virtual software agents, but the latter are usually referred to as bots.There is no consensus on which machines qualify as robots, but there is general agreement among experts and the public that robots tend to do some or all of the following: move around, operate a mechanical limb, sense and manipulate their environment, and exhibit intelligent behavior, especially behavior which mimics humans or other animals. In South Africa, robot is an informal and commonly used term for a set of traffic lights.
Stories of artificial helpers and companions and attempts to create them have a long history but fully autonomous machines only appeared in the 20th century. The first digitally operated and programmable robot, the Unimate, was installed in 1961 to lift hot pieces of metal from a die casting machine and stack them. Today, commercial and industrial robots are in widespread use performing jobs more cheaply or with greater accuracy and reliability than humans. They are also employed for jobs which are too dirty, dangerous or dull to be suitable for humans. Robots are widely used in manufacturing, assembly and packing, transport, earth and space exploration, surgery, weaponry, laboratory research, and mass production of consumer and industrial goods.
Modern robots are usually used in tightly controlled environments such as on assembly lines because they have difficulty responding to unexpected interference. Because of this, most humans rarely encounter robots. However, domestic robots for cleaning and maintenance are increasingly common in and around homes in developed countries, particularly in Japan. Robots can also be found in the military.
Defining characteristics
 |  | |
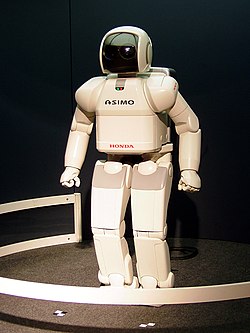
| KITT is mentally anthropomorphic, while ASIMO is physically anthropomorphic | ||
While there is no single correct definition of "robot",a typical robot will have several or possibly all of the following characteristics.
- It is composed entirely, or almost entirely, from artificial substances.
- It can sense its environment, and manipulate or interact with things in it.
- It has some ability to make choices based on the environment, often using automatic control or a preprogrammed sequence.
- It is programmable.
- It moves with one or more axes of rotation or translation.
- It makes dexterous coordinated movements.
- It moves without direct human intervention.
- It appears to have intent or agency.
The last property, the appearance of agency, is important when people are considering whether to call a machine a robot, or just a machine. (See anthropomorphism for examples of ascribing intent to inanimate objects.)
Mental agency
For robotic engineers, the physical appearance of a machine is less important than the way its actions are controlled. The more the control system seems to have agency of its own, the more likely the machine is to be called a robot. An important feature of agency is the ability to make choices.
- A clockwork car is never considered a robot.
- A remotely operated vehicle is sometimes considered a robot (or telerobot).
- A car with an onboard computer, like Bigtrak, which could drive in a programmable sequence, might be called a robot.
- A self-controlled car which could sense its environment and make driving decisions based on this information, such as the 1990s driverless cars of Ernst Dickmanns or the entries in the DARPA Grand Challenge, would quite likely be called a robot.
- A sentient car, like the fictional KITT, which can make decisions, navigate freely and converse fluently with a human, is usually considered a robot.
Physical agency
However, for many laymen, if a machine appears to be able to control its arms or limbs, and especially if it appears anthropomorphic or zoomorphic (e.g. ASIMO or Aibo), it would be called a robot.
- A player piano is rarely characterized as a robot.
- A CNC milling machine is very occasionally characterized as a robot.
- A factory automation arm is almost always characterized as an industrial robot.
- An autonomous wheeled or tracked device, such as a self-guided rover or self-guided vehicle, is almost always characterized as a mobile robot or service robot.
- A zoomorphic mechanical toy, like Roboraptor, is usually characterized as a robot.
- A mechanical humanoid, like ASIMO, is almost always characterized as a robot, usually as a service robot.
Even for a 3-axis CNC milling machine using the same control system as a robot arm, it is the arm which is almost always called a robot, while the CNC machine is usually just a machine. Having eyes can also make a difference in whether a machine is called a robot, since humans instinctively connect eyes with sentience. However, simply being anthropomorphic is not a sufficient criterion for something to be called a robot. A robot must do something; an inanimate object shaped like ASIMO would not be considered a robot.
Definitions

It is difficult to compare numbers of robots in different countries, since there are different definitions of what a "robot" is. The International Organization for Standardization gives a definition of robot in ISO 8373: "an automatically controlled, reprogrammable, multipurpose, manipulator programmable in three or more axes, which may be either fixed in place or mobile for use in industrial automation applications."This definition is used by the International Federation of Robotics, the European Robotics Research Network (EURON), and many national standards committees.
The Robotics Institute of America (RIA) uses a broader definition: a robot is a "re-programmable multi-functional manipulator designed to move materials, parts, tools, or specialized devices through variable programmed motions for the performance of a variety of tasks".The RIA subdivides robots into four classes: devices that manipulate objects with manual control, automated devices that manipulate objects with predetermined cycles, programmable and servo-controlled robots with continuous point-to-point trajectories, and robots of this last type which also acquire information from the environment and move intelligently in response.
There is no one definition of robot which satisfies everyone, and many people have their own.For example, Joseph Engelberger, a pioneer in industrial robotics, once remarked: "I can't define a robot, but I know one when I see one."According to Encyclopaedia Britannica, a robot is "any automatically operated machine that replaces human effort, though it may not resemble human beings in appearance or perform functions in a humanlike manner".[12] Merriam-Webster describes a robot as a "machine that looks like a human being and performs various complex acts (as walking or talking) of a human being", or a "device that automatically performs complicated often repetitive tasks", or a "mechanism guided by automatic controls".
Etymology
See also: Robots in literature

The word robot was introduced to the public by Czech writer Karel Čapek in his play R.U.R. (Rossum's Universal Robots), published in 1920.The play begins in a factory that makes artificial people called robots, but they are closer to the modern ideas of androids, creatures who can be mistaken for humans. They can plainly think for themselves, though they seem happy to serve. At issue is whether the robots are being exploited and the consequences of their treatment.
However, Karel Čapek himself did not coin the word. He wrote a short letter in reference to an etymology in the Oxford English Dictionary in which he named his brother, the painter and writer Josef Čapek, as its actual originator.In an article in the Czech journal Lidové noviny in 1933, he explained that he had originally wanted to call the creatures laboři (from Latin labor, work). However, he did not like the word, and sought advice from his brother Josef, who suggested "roboti". The word robota means literally work, labor or serf labor, and figuratively "drudgery" or "hard work" in Czech and many Slavic languages.Serfdom was outlawed in 1848 in Bohemia, so at the time Čapek wrote R.U.R., usage of the term robota had broadened to include various types of work, but the obsolete sense of "serfdom" would still have been known.
The word robotics, used to describe this field of study, was coined (albeit accidentally) by the science fiction writer Isaac Asimov.
Computer
A computer is a machine that manipulates data according to a set of instructions.
Although mechanical examples of computers have existed through much of recorded human history, the first electronic computers were developed in the mid-20th century (1940–1945). These were the size of a large room, consuming as much power as several hundred modern personal computers (PCs). Modern computers based on integrated circuits are millions to billions of times more capable than the early machines, and occupy a fraction of the space.Simple computers are small enough to fit into a wristwatch, and can be powered by a watch battery. Personal computers in their various forms are icons of the Information Age and are what most people think of as "computers". The embedded computers found in many devices from MP3 players to fighter aircraft and from toys to industrial robots are however the most numerous.
The ability to store and execute lists of instructions called programs makes computers extremely versatile, distinguishing them from calculators. The Church–Turing thesis is a mathematical statement of this versatility: any computer with a certain minimum capability is, in principle, capable of performing the same tasks that any other computer can perform. Therefore computers ranging from a mobile phone to a supercomputer are all able to perform the same computational tasks, given enough time and storage capacity.
The first use of the word "computer" was recorded in 1613, referring to a person who carried out calculations, or computations, and the word continued to be used in that sense until the middle of the 20th century. From the end of the 19th century onwards though, the word began to take on its more familiar meaning, describing a machine that carries out computations.
HISTORY OF COMPUTER
The history of the modern computer begins with two separate technologies—automated calculation and programmability—but no single device can be identified as the earliest computer, partly because of the inconsistent application of that term. Examples of early mechanical calculating devices include the abacus, the slide rule and arguably the astrolabe and the Antikythera mechanism (which dates from about 150–100 BC). Hero of Alexandria (c. 10–70 AD) built a mechanical theater which performed a play lasting 10 minutes and was operated by a complex system of ropes and drums that might be considered to be a means of deciding which parts of the mechanism performed which actions and when.This is the essence of programmability.
The "castle clock", an astronomical clock invented by Al-Jazari in 1206, is considered to be the earliest programmable analog computer.It displayed the zodiac, the solar and lunar orbits, a crescent moon-shaped pointer travelling across a gateway causing automatic doors to open every hour,and five robotic musicians who played music when struck by levers operated by a camshaft attached to a water wheel. The length of day and night could be re-programmed to compensate for the changing lengths of day and night throughout the year.he Renaissance saw a re-invigoration of European mathematics and engineering. Wilhelm Schickard's 1623 device was the first of a number of mechanical calculators constructed by European engineers, but none fit the modern definition of a computer, because they could not be programmed.
In 1801, Joseph Marie Jacquard made an improvement to the textile loom by introducing a series of punched paper cards as a template which allowed his loom to weave intricate patterns automatically. The resulting Jacquard loom was an important step in the development of computers because the use of punched cards to define woven patterns can be viewed as an early, albeit limited, form of programmability.
It was the fusion of automatic calculation with programmability that produced the first recognizable computers. In 1837, Charles Babbage was the first to conceptualize and design a fully programmable mechanical computer, his analytical engine.Limited finances and Babbage's inability to resist tinkering with the design meant that the device was never completed.
In the late 1880s Herman Hollerith invented the recording of data on a machine readable medium. Prior uses of machine readable media, above, had been for control, not data. "After some initial trials with paper tape, he settled on punched cards ..."To process these punched cards he invented the tabulator, and the key punch machines. These three inventions were the foundation of the modern information processing industry. Large-scale automated data processing of punched cards was performed for the 1890 United States Census by Hollerith's company, which later became the core of IBM. By the end of the 19th century a number of technologies that would later prove useful in the realization of practical computers had begun to appear: the punched card, Boolean algebra, the vacuum tube (thermionic valve) and the teleprinter.
During the first half of the 20th century, many scientific computing needs were met by increasingly sophisticated analog computers, which used a direct mechanical or electrical model of the problem as a basis for computation. However, these were not programmable and generally lacked the versatility and accuracy of modern digital computers.
Alan Turing is widely regarded to be the father of modern computer science. In 1936 Turing provided an influential formalisation of the concept of the algorithm and computation with the Turing machine. Of his role in the modern computer, Time Magazine in naming Turing one of the 100 most influential people of the 20th century, states: "The fact remains that everyone who taps at a keyboard, opening a spreadsheet or a word-processing program, is working on an incarnation of a Turing machine."
George Stibitz is internationally recognized as a father of the modern digital computer. While working at Bell Labs in November 1937, Stibitz invented and built a relay-based calculator he dubbed the "Model K" (for "kitchen table", on which he had assembled it), which was the first to use binary circuits to perform an arithmetic operation. Later models added greater sophistication including complex arithmetic and programmability.
A general purpose computer has four main components: the arithmetic logic unit (ALU), the control unit, the memory, and the input and output devices (collectively termed I/O). These parts are interconnected by busses, often made of groups of wires.
Inside each of these parts are thousands to trillions of small electrical circuits which can be turned off or on by means of an electronic switch. Each circuit represents a bit (binary digit) of information so that when the circuit is on it represents a "1", and when off it represents a "0" (in positive logic representation). The circuits are arranged in logic gates so that one or more of the circuits may control the state of one or more of the other circuits.
The control unit, ALU, registers, and basic I/O (and often other hardware closely linked with these) are collectively known as a central processing unit (CPU). Early CPUs were composed of many separate components but since the mid-1970s CPUs have typically been constructed on a single integrated circuit called a microprocessor.
 A computer's memory can be viewed as a list of cells into which numbers can be placed or read. Each cell has a numbered "address" and can store a single number. The computer can be instructed to "put the number 123 into the cell numbered 1357" or to "add the number that is in cell 1357 to the number that is in cell 2468 and put the answer into cell 1595". The information stored in memory may represent practically anything. Letters, numbers, even computer instructions can be placed into memory with equal ease. Since the CPU does not differentiate between different types of information, it is the software's responsibility to give significance to what the memory sees as nothing but a series of numbers.
A computer's memory can be viewed as a list of cells into which numbers can be placed or read. Each cell has a numbered "address" and can store a single number. The computer can be instructed to "put the number 123 into the cell numbered 1357" or to "add the number that is in cell 1357 to the number that is in cell 2468 and put the answer into cell 1595". The information stored in memory may represent practically anything. Letters, numbers, even computer instructions can be placed into memory with equal ease. Since the CPU does not differentiate between different types of information, it is the software's responsibility to give significance to what the memory sees as nothing but a series of numbers.
In almost all modern computers, each memory cell is set up to store binary numbers in groups of eight bits (called a byte). Each byte is able to represent 256 different numbers (2^8 = 256); either from 0 to 255 or -128 to +127. To store larger numbers, several consecutive bytes may be used (typically, two, four or eight). When negative numbers are required, they are usually stored in two's complement notation. Other arrangements are possible, but are usually not seen outside of specialized applications or historical contexts. A computer can store any kind of information in memory if it can be represented numerically. Modern computers have billions or even trillions of bytes of memory.
The CPU contains a special set of memory cells called registers that can be read and written to much more rapidly than the main memory area. There are typically between two and one hundred registers depending on the type of CPU. Registers are used for the most frequently needed data items to avoid having to access main memory every time data is needed. As data is constantly being worked on, reducing the need to access main memory (which is often slow compared to the ALU and control units) greatly increases the computer's speed.
Computer main memory comes in two principal varieties: random access memory or RAM and read-only memory or ROM. RAM can be read and written to anytime the CPU commands it, but ROM is pre-loaded with data and software that never changes, so the CPU can only read from it. ROM is typically used to store the computer's initial start-up instructions. In general, the contents of RAM are erased when the power to the computer is turned off, but ROM retains its data indefinitely. In a PC, the ROM contains a specialized program called the BIOS that orchestrates loading the computer's operating system from the hard disk drive into RAM whenever the computer is turned on or reset. In embedded computers, which frequently do not have disk drives, all of the required software may be stored in ROM. Software stored in ROM is often called firmware, because it is notionally more like hardware than software. Flash memory blurs the distinction between ROM and RAM, as it retains its data when turned off but is also rewritable. It is typically much slower than conventional ROM and RAM however, so its use is restricted to applications where high speed is unnecessary.
In more sophisticated computers there may be one or more RAM cache memories which are slower than registers but faster than main memory. Generally computers with this sort of cache are designed to move frequently needed data into the cache automatically, often without the need for any intervention on the programmer's part.
Communication
Communication is a process of transferring information from one entity to another. Communication processes are sign-mediated interactions between at least two agents which share a repertoire of signs and semiotic rules. Communication is commonly defined as "the imparting or interchange of thoughts, opinions, or information by speech, writing, or signs". Communication can be perceived as a two-way process in which there is an exchange and progression of thoughts, feelings or ideas towards a mutually accepted[clarification needed] goal or direction.
Logic Gate
A logic gate performs a logical operation on one or more logic inputs and produces a single logic output. The logic normally performed is Boolean logic and is most commonly found in digital circuits. Logic gates are primarily implemented electronically using diodes or transistors, but can also be constructed using electromagnetic relays, fluidics, optics, molecules, or even mechanical elements.
In electronic logic, a logic level is represented by a voltage or current, (which depends on the type of electronic logic in use). Each logic gate requires power so that it can source and sink currents to achieve the correct output voltage. In logic circuit diagrams the power is not shown, but in a full electronic schematic, power connections are required.
Truth table
A truth table is a table that describes the behaviour of a logic gate. It lists the value of the output for every possible combination of the inputs and can be used to simplify the number of logic gates and level of nesting in an electronic circuit. In general the truth table does not lead to an efficient implementation; a minimization procedure, using Karnaugh maps, the Quine–McCluskey algorithm or a heuristic algorithm is required for reducing the circuit complexity.
Logic gates
NAND and NOR logic gates are the two pillars of logic, in that all other types of Boolean logic gates (i.e., AND, OR, NOT, XOR, XNOR) can be created from a suitable network of just NAND or just NOR gate(s). They can be built from relays or transistors, or any other technology that can create an inverter and a two-input AND or OR gate. Hence the NAND and NOR gates are called the universal gates.
The four functions denoted by arrows are the logical implication functions. These functions are generally less common, and are usually not implemented directly as logic gates, but rather built out of gates like AND and OR.Symbols

There are two sets of symbols in common use, both now defined by ANSI/IEEE Std 91-1984 and its supplement ANSI/IEEE Std 91a-1991. The "distinctive shape" set, based on traditional schematics, is used for simple drawings and is quicker to draw by hand. It is sometimes unofficially described as "military", reflecting its origin if not its modern usage. The "rectangular shape" set, based on IEC 60617-12, has rectangular outlines for all types of gate, and allows representation of a much wider range of devices than is possible with the traditional symbols. The IEC's system has been adopted by other standards, such as EN 60617-12:1999 in Europe and BS EN 60617-12:1999 in the United Kingdom.
The goal of IEEE Std 91-1984 was to provide a uniform method of describing the complex logic functions of digital circuits with schematic symbols. These functions were more complex than simple AND and OR gates. They could be medium scale circuits such as a 4-bit counter to a large scale circuits such as a microprocessor. The 1984 version did not include the "distinctive shape" symbols.[1] These were added to the 1991 supplement with this note: "The distinctive-shape symbol is, according to IEC Publication 617, Part 12, not preferred, but is not considered to be in contradiction to that standard."
In the 1980s, schematics were the predominant method to design both circuit boards and custom ICs known as gate arrays. Today custom ICs and the field-programmable gate array are typically designed with Hardware Description Languages (HDL) such as Verilog or VHDL. The need for complex logic symbols has diminished and distinctive shape symbols are still the predominate style.
| Type | Distinctive shape | Rectangular shape | Boolean algebra between A & B | Truth table | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AND |  |  |  |
| ||||||||||||||||||
| OR |  |  | A + B |
| ||||||||||||||||||
| NOT |  |  |  |
| ||||||||||||||||||
| In electronics a NOT gate is more commonly called an inverter. The circle on the symbol is called a bubble, and is generally used in circuit diagrams to indicate an inverted (active-low) input or output.[1] | ||||||||||||||||||||||
| NAND |  |  |  |
| ||||||||||||||||||
| NOR |  |  |  |
| ||||||||||||||||||
| XOR |  |  |  |
| ||||||||||||||||||
| XNOR |  |  |  |
| ||||||||||||||||||
In practice, the cheapest gate to manufacture is usually the NAND gate. Additionally, Charles Sanders Peirce (1880) showed that NAND gates alone (as well as NOR gates alone) can be used to reproduce the functions of all the other logic gates, but his work on it was unpublished until 1935. The first published proof was by Henry M. Sheffer in 1913.

Two more gates are the exclusive-OR or XOR function and its inverse, exclusive-NOR or XNOR. The two input Exclusive-OR is true only when the two input values are different, false if they are equal, regardless of the value. If there are more than two inputs, the gate generates a true at its output if the number of trues at its input is odd ([2]). In practice, these gates are built from combinations of simpler logic gates.
Digital electronics
Digital electronics are electronics systems that use digital signals. Digital electronics are representations of Boolean algebra (also see truth tables) and are used in computers, mobile phones, and other consumer products. In a digital circuit, a signal is represented in discrete states or logic levels. The advantages of digital techniques stem from the fact it is easier to get an electronic device to switch into one of a number of known states, than to accurately reproduce a continuous range of values, traditionally only two states, '1' and '0' are used though digital systems are not limited to this.
Digital electronics or any digital circuit are usually made from large assemblies of logic gates, simple electronic representations of Boolean logic functions.
To most electronic engineers, the terms "digital circuit", "digital system" and "logic" are interchangeable in the context of digital circuits.
Advantages
One advantage of digital circuits when compared to analog circuits is [1] that signals represented digitally can be transmitted without degradation due to noise. For example, a continuous audio signal, transmitted as a sequence of 1s and 0s, can be reconstructed without error provided the noise picked up in transmission is not enough to prevent identification of the 1s and 0s. An hour of music can be stored on a compact disc as about 6 billion binary digits.
In a digital system, a more precise representation of a signal can be obtained by using more binary digits to represent it. While this requires more digital circuits to process the signals, each digit is handled by the same kind of hardware. In an analog system, additional resolution requires fundamental improvements in the linearity and noise charactersitics of each step of the signal chain.
Computer-controlled digital systems can be controlled by software, allowing new functions to be added without changing hardware. Often this can be done outside of the factory by updating the product's software. So, the product's design errors can be corrected after the product is in a customer's hands.
Information storage can be easier in digital systems than in analog ones. The noise-immunity of digital systems permits data to be stored and retrieved without degradation. In an analog system, noise from aging and wear degrade the information stored. In a digital system, as long as the total noise is below a certain level, the information can be recovered perfectly.
Disadvantages
In some cases, digital circuits use more energy than analog circuits to accomplish the same tasks, thus producing more heat. In portable or battery-powered systems this can limit use of digital systems.
For example, battery-powered cellular telephones often use a low-power analog front-end to amplify and tune in the radio signals from the base station. However, a base station has grid power and can use power-hungry, but very flexible software radios. Such base stations can be easily reprogrammed to process the signals used in new cellular standards.
Digital circuits are sometimes more expensive, especially in small quantities.
The sensed world is analog, and signals from this world are analog quantities. For example, light, temperature, sound, electrical conductivity, electric and magnetic fields are analog. Most useful digital systems must translate from continuous analog signals to discrete digital signals. This causes quantization errors.
Quantization error can be reduced if the system stores enough digital data to represent the signal to the desired degree of fidelity. The Nyquist-Shannon sampling theorem provides an important guideline as to how much digital data is needed to accurately portray a given analog signal.
In some systems, if a single piece of digital data is lost or misinterpreted, the meaning of large blocks of related data can completely change. Because of the cliff effect, it can be difficult for users to tell if a particular system is right on the edge of failure, or if it can tolerate much more noise before failing.
Digital fragility can be reduced by designing a digital system for robustness. For example, a parity bit or other error management method can be inserted into the signal path. These schemes help the system detect errors, and then either correct the errors, or at least ask for a new copy of the data. In a state-machine, the state transition logic can be designed to catch unused states and trigger a reset sequence or other error recovery routine.
Embedded software designs that employ Immunity Aware Programming, such as the practice of filling unused program memory with interrupt instructions that point to an error recovery routine. This helps guard against failures that corrupt the microcontroller's instruction pointer which could otherwise cause random code to be executed.
Digital memory and transmission systems can use techniques such as error detection and correction to use additional data to correct any errors in transmission and storage.
On the other hand, some techniques used in digital systems make those systems more vulnerable to single-bit errors. These techniques are acceptable when the underlying bits are reliable enough that such errors are highly unlikely.
- A single-bit error in audio data stored directly as linear pulse code modulation (such as on a CD-ROM) causes, at worst, a single click. Instead, many people use audio compression to save storage space and download time, even though a single-bit error may corrupt the entire song.
Thyristor
The thyristor is a solid-state semiconductor device with four layers of alternating N and P-type material. They act as bistable switches, conducting when their gate receives a current pulse, and continue to conduct for as long as they are forward biased (that is, as long as the voltage across the device has not reversed).
Some sources define silicon controlled rectifiers and thyristors as synonymous.Function
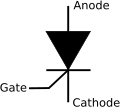
The thyristor is a four-layer semiconducting device, with each layer consisting of alternately N-type or P-type material, for example P-N-P-N. The main terminals, labeled anode and cathode, are across the full four layers, and the control terminal, called the gate, is attached to p-type material near to the cathode. (A variant called an SCS—Silicon Controlled Switch—brings all four layers out to terminals.) The operation of a thyristor can be understood in terms of a pair of tightly coupled Bipolar Junction Transistors, arranged to cause the self-latching action:

Thyristors have three states:
- Reverse blocking mode — Voltage is applied in the direction that would be blocked by a diode
- Forward blocking mode — Voltage is applied in the direction that would cause a diode to conduct, but the thyristor has not yet been triggered into conduction
- Forward conducting mode — The thyristor has been triggered into conduction and will remain conducting until the forward current drops below a threshold value known as the "holding current"
Function of the gate terminal
The thyristor has three p-n junctions (serially named J1, J2, J3 from the anode).

When the anode is at a positive potential VAK with respect to the cathode with no voltage applied at the gate, junctions J1 and J3 are forward biased, while junction J2 is reverse biased. As J2 is reverse biased, no conduction takes place (Off state). Now if VAK is increased beyond the breakdown voltage VBO of the thyristor, avalanche breakdown of J2 takes place and the thyristor starts conducting (On state).
If a positive potential VG is applied at the gate terminal with respect to the cathode, the breakdown of the junction J2 occurs at a lower value of VAK. By selecting an appropriate value of VG, the thyristor can be switched into the on state suddenly.
It should be noted that once avalanche breakdown has occurred, the thyristor continues to conduct, irrespective of the gate voltage, until both: (a) the potential VG is removed and (b) the current through the device (anode−cathode) is less than the holding current specified by the manufacturer. Hence VG can be a voltage pulse, such as the voltage output from a UJT relaxation oscillator.
These gate pulses are characterized in terms of gate trigger voltage (VGT) and gate trigger current (IGT). Gate trigger current varies inversely with gate pulse width in such a way that it is evident that there is a minimum gate charge required to trigger the thyristor.
Transistor
In electronics, a transistor is a semiconductor device commonly used to amplify or switch electronic signals. A transistor is made of a solid piece of a semiconductor material, with at least three terminals for connection to an external circuit. A voltage or current applied to one pair of the transistor's terminals changes the current flowing through another pair of terminals. Because the controlled (output) power can be much more than the controlling (input) power, the transistor provides amplification of a signal.
The transistor is the fundamental building block of modern electronic devices, and is used in radio,telephone,computer and other electronic systems. The transistor is often cited as being one of the greatest achievements in the 20th century, and some consider it one of the most important technological breakthroughs in human history. Some transistors are packaged individually but most are found in intergrated circuit.
Transistor as a switch
Transistors are commonly used as electronic switches, for both high power applications including switched-mode power supplies and low power applications such as logic gates.
Using the simple transistor circuit it can be seen from the graph, from point a to point b, as the base voltage rises the base and collector current rise exponentially (the a-b segment should be curved), but the collector voltage simultaneously drops because of the collector resistor. Relevant equations:
- VRC = IC × RC
- VRC + VCE = VCC
If VCE could fall to 0 (perfect closed switch) then Ic could go no higher than VCC / RC, even with higher base voltage and current. The transistor is then said to be saturated. In actuality VCE drops to roughly VBE ÷ 2, rising with higher collector currents. Hence, values of input voltage can be chosen such that the output is either completely off,[8] or completely on. The transistor is acting as a switch, and this type of operation is common in digital circuits where only "on" and "off" values are relevant.
Transistor as an amplifier
The above common emitter amplifier is designed so that a small change in voltage in (Vin) changes the small current through the base of the transistor and the transistor's current amplification combined with the properties of the circuit mean that small swings in Vin produce large changes in Vout.
It is important that the operating parameters of the transistor are chosen and the circuit designed such that as far as possible the transistor operates within a linear portion of the graph, such as that shown between A and B, otherwise the output signal will suffer distortion.
Various configurations of single transistor amplifier are possible, with some providing current gain, some voltage gain, and some both.
From mobile phones to televisions, vast numbers of products include amplifiers for sound reproduction, radio transmission, and signal processing. The first discrete transistor audio amplifiers barely supplied a few hundred milliwatts, but power and audio fidelity gradually increased as better transistors became available and amplifier architecture evolved.
Modern transistor audio amplifiers of up to a few hundred watts are common and relatively inexpensive.
Some musical instrument amplifier manufacturers mix transistors and vacuum tubes in the same circuit, as some believe tubes have a distinctive sound.
Advantages
The key advantages that have allowed transistors to replace their vacuum tube predecessors in most applications are
- Small size and minimal weight, allowing the development of miniaturized electronic devices.
- Highly automated manufacturing processes, resulting in low per-unit cost.
- Lower possible operating voltages, making transistors suitable for small, battery-powered applications.
- No warm-up period for cathode heaters required after power application.
- Lower power dissipation and generally greater energy efficiency.
- Higher reliability and greater physical ruggedness.
- Extremely long life. Some transistorized devices have been in service for more than 30 years.
- Complementary devices available, facilitating the design of complementary-symmetry circuits, something not possible with vacuum tubes.
- Insensitivity to mechanical shock and vibration, thus avoiding the problem of microphonics in audio applications.
Limitations
- Silicon transistors do not operate at voltages higher than about 1,000 volts (SiC devices can be operated as high as 3,000 volts). In contrast, electron tubes have been developed that can be operated at tens of thousands of volts.
- High power, high frequency operation, such as used in over-the-air television broadcasting, is better achieved in electron tubes due to improved electron mobility in a vacuum.
- On average, a higher degree of amplification linearity can be achieved in electron tubes as compared to equivalent solid state devices, a characteristic that may be important in high fidelity audio reproduction.
- Silicon transistors are much more sensitive than electron tubes to an electromagnetic pulse, such as generated by a nuclear explosion.
Saturday, July 4, 2009
Resistant
Perintang merupakan komponen yang menghadkan pengaliran arus dalam litar. Pemilihan perintang dipilih mengikut kesesuaian penggunaannya dalam litar. Apabila memilih perintang, empat perkara perlu dipertimbangkan.
- Nilai rintangan - Nilai rintangan dapat dibaca sama ada dengan menggunakan kod warna atau kod tercetak pada badan perintang.
- Had terima - Had terima menunjukkan nilai minimum dan maksimum bagi perintang.
- Kadar Kuasa - Saiz perintang menunjukkan kuasa maksimum yang boleh diterima oleh perintang.
- Kestabilan - Perintang yang mempunyai kestabilan tinggi dapat mengekalkan rintangan dengan perubahan suhu dan jangka hayat.
Nilai rintangan sesuatu perintang dapat ditentukan dengan mentafsirkan warna jalur yang tercetak pada badannya.
Biasanya terdapat empat jalur yang tercetak pada badan perintang. Jalur pertama dan kedua menunjukkan digit pertama dan digit kedua. Jalur ketiga merupakan nilai pendarab. Jalur keempat ialah nilai had yang diterima.
 Formula berikut boleh digunakan untuk menentukan nilai rintangan perintang.
Formula berikut boleh digunakan untuk menentukan nilai rintangan perintang.- Nilai rintangan, [ R = (AB x C) +/ - D ]
Subscribe to:
Comments (Atom)


